手術支援ロボット ダビンチ
(da Vinci surgical system)
da Vinci(ダビンチ)とは
ダビンチはアメリカで開発された内視鏡手術支援ロボットです。ロボットといっても、医師の代わりに手術を自動で行うのではなく医師がロボットを遠隔操作することにより、患者さんの身体的な負担が少ない腹腔鏡下手術の特徴を活かしつつロボットの機能による支援によって、従来不可能とされていた手術操作を可能とするシステムです。具体的には、患者さんの身体に数か所開けた1~2㎝の小さな切開部から専用の内視鏡カメラとロボットアームを挿入し、術者は操作台の3Dモニターを見ながら術野に手を入れているようにロボットアームを操作して手術を行います。
3つの特徴
① 鮮明かつ立体的なハイビジョン3D画像と術野を10倍まで拡大するズーム機能
ダビンチには、3本のアームの他に、1本の内視鏡カメラアームがあり、3Dカメラで患者さんの体内を立体的に映し出します。カメラにはズーム機能が搭載されており、最大約10倍まで拡大することができます。そのため、今まで見ることのできなかった組織を術者が認識することが可能になり、より精密な手術が実現できます。
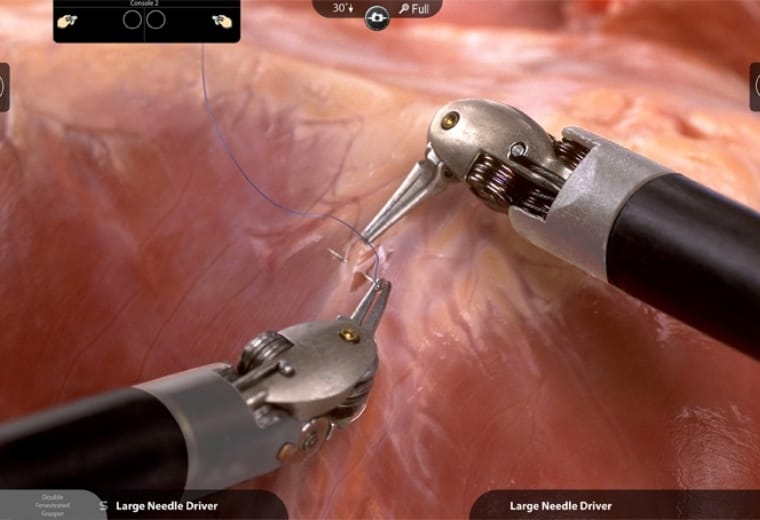
② ヒトの手以上の器用さと可動域を持つEndoWrist®インストゥルメント(鉗子)

医師の手指の代わりに患者さんの体内に入るダビンチの鉗子は3つの部位で構成されています。3つの部位はそれぞれが、人間の腕、手首、指のような役目を持っており、人間の手の可動域以上の自在な動きが可能です。また、指先にあたる部分は用途に応じた最適な40種類以上の形があり、組織を摘まむ、切る、針を持って縫合するなど医師の手元の動きに連動して細かく動きます。これらの機能により、より複雑で精密な動きが可能となり手術をスムーズに行うことができます。
③ 手の細やかな震えをシャットダウンし安全性を高めるフィルター機能
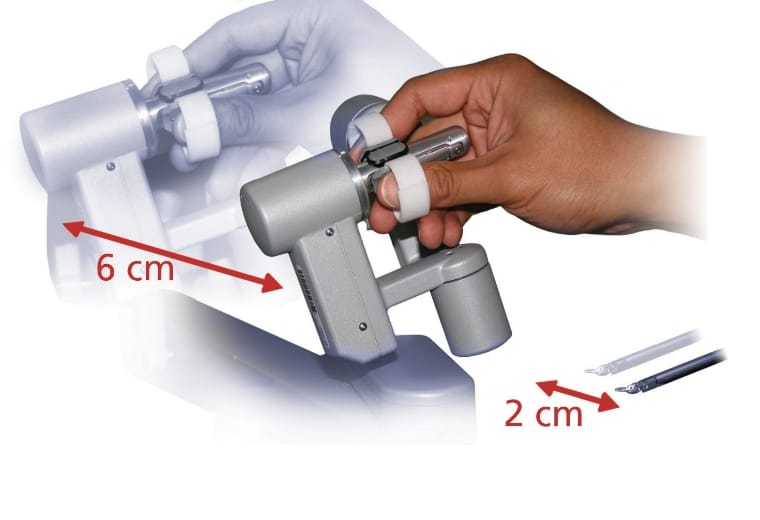
ダビンチには手ぶれを補正する機能が搭載されています。細い血管の縫合や神経の剥離など、高い集中力を必要とする細かな作業でも、正確に操作することが可能となります。また、モーションスケールといって、大きな手の動きを小さなゆっくりとした動きに縮小して鉗子に伝える機能が搭載されています。これは人の手が5㎝動いたら鉗子は1㎝動かすというような人の動作を縮小して伝える仕組みです。これらの機能により、より正確な操作が実現されます。
「患者さんにやさしい」ダビンチ手術
ダビンチ手術は、腹腔鏡下手術と同様に患者さんの身体に小さな穴を開けて行う切開部が小さな手術です。この手術は、傷跡や出血量が最小限に抑えられ、術後の早期回復、入院期間の短縮にも繋がるなど身体への負担が少ない低侵襲手術が可能となり、開腹手術と比べて患者さんに様々なメリットがあります。
ダビンチ手術のメリット
- 手術創が小さく傷跡が目立たない
- 術中の出血が少ない
- 機能の温存が向上
- 術後の疼痛が少なく回復も早い
- 術後合併症のリスクが低い

当院でのダビンチによるロボット支援手術について
当院では、現在(2025年4月1日時点)以下のロボット支援手術を実施しております。また、以下の手術は保険適用で受けることができます。
- 胃がんに対する胃切除術・胃全摘術
- 直腸がんに対する直腸切除、切断術
- 結腸がんに対する結腸切除術
- 腎臓がんに対する腎部分切除術
- 前立腺がんに対する前立腺全摘手術
- 子宮の良性腫瘍に対する子宮全摘手術

病院について
- 当院における取り組み
- 院内施設・設備のご案内
- 入札・契約情報
- 病院指標
- アクセス
- 病院広報誌
- 市民公開講座
- 院内行事・イベント
- 厚生労働大臣の定める掲示事項
-
人を対象とする医学系研究に関する情報公開について
関連ページ